
Прикрепите акселерометр к тестируемому устройству.
Используйте пчелиный воск, чтобы прикрепить акселерометр в месте, указанном в тестовом приложении.
Крепление акселерометра должно быть прочным, но при этом легко сниматься между заездами.
Установите ориентацию акселерометра в зависимости от типа исполнительного механизма.
Линейный резонансный актуатор (ЛРА) по оси X: Убедитесь, что знак -> на акселерометре совпадает с направлением длины ЛРА. Это направление, как правило, соответствует направлению резонанса.
Линейный резонансный актуатор (ЛРА) по оси Z: используйте ориентацию акселерометра, описанную в инструкциях по использованию ЛРА по оси X выше.
Эксцентриковый вращающийся массовый привод (ЭВР): Измерьте сигнал по всем трем осям, затем выберите данные с наибольшей амплитудой сигнала.
Откройте тестовое приложение на тестируемом устройстве и сгенерируйте целевые эффекты.
Используйте Bluetooth-мышь для нажатия целевых кнопок в приложении. Это позволит вам нажимать на кнопки приложения без приложения дополнительных усилий, например, давления пальца.
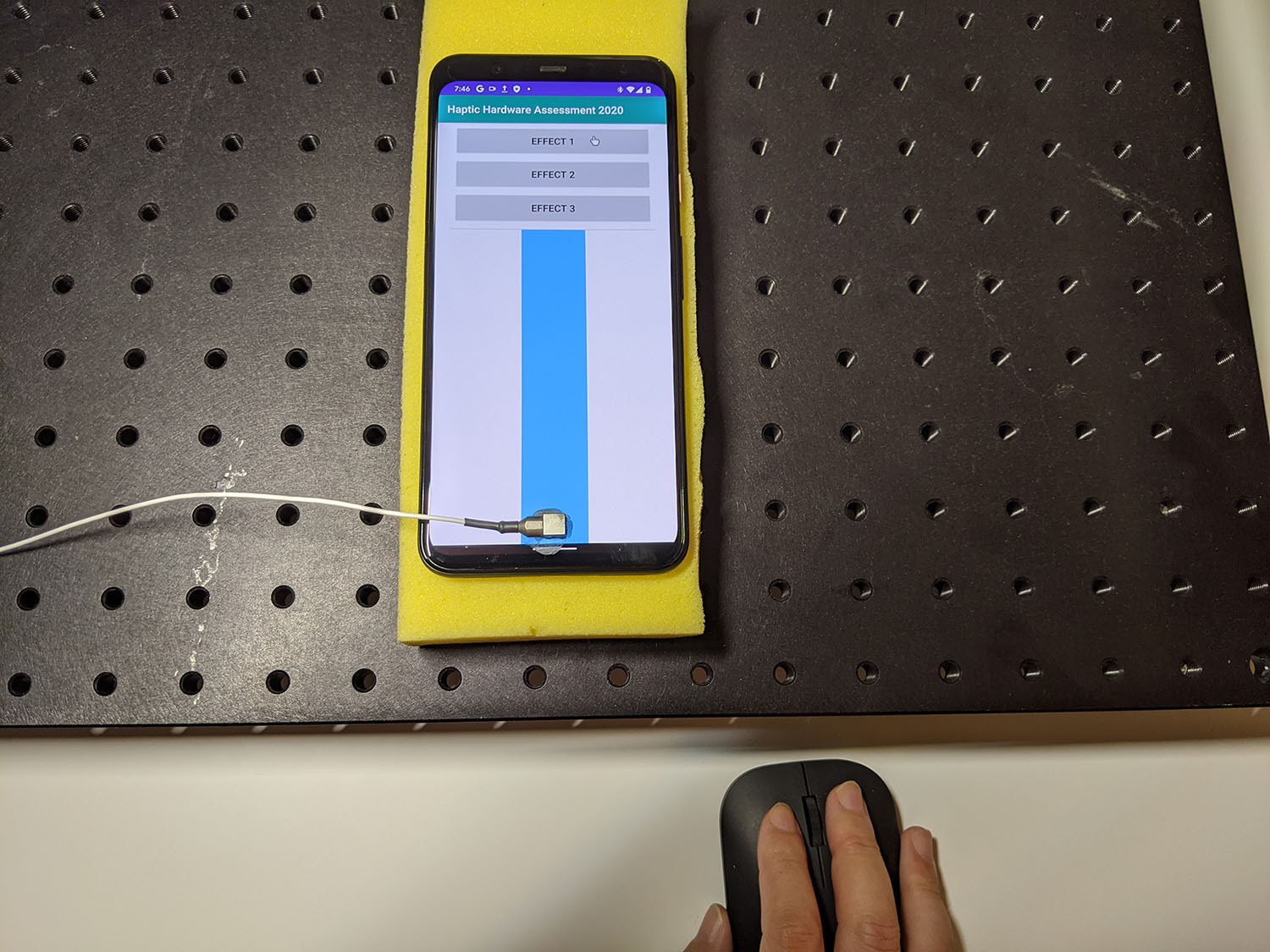
Рисунок 1. Исследуемое устройство, генерирующее целевые эффекты.
Запишите звуковой сигнал из тестового приложения с помощью Audacity и экспортируйте файл:
- Нажмите кнопку «Запись» в программе «Audacity».
- Нажмите каждую из целевых кнопок в тестовом приложении.
Экспортируйте запись в формате WAV.
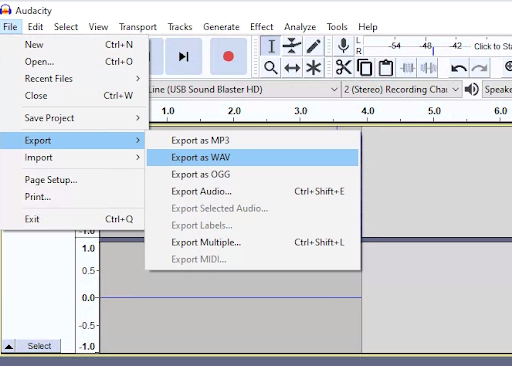
Рисунок 2. Экспорт из Audacity.
Измеряйте и записывайте целевые эффекты
Контент и образцы кода на этой странице предоставлены по лицензиям. Java и OpenJDK – это зарегистрированные товарные знаки корпорации Oracle и ее аффилированных лиц.
Последнее обновление: 2026-06-18 UTC.
[[["Прост для понимания","easyToUnderstand","thumb-up"],["Помог мне решить мою проблему","solvedMyProblem","thumb-up"],["Другое","otherUp","thumb-up"]],[["Отсутствует нужная мне информация","missingTheInformationINeed","thumb-down"],["Слишком сложен/слишком много шагов","tooComplicatedTooManySteps","thumb-down"],["Устарел","outOfDate","thumb-down"],["Проблема с переводом текста","translationIssue","thumb-down"],["Проблемы образцов/кода","samplesCodeIssue","thumb-down"],["Другое","otherDown","thumb-down"]],["Последнее обновление: 2026-06-18 UTC."],[],[]]